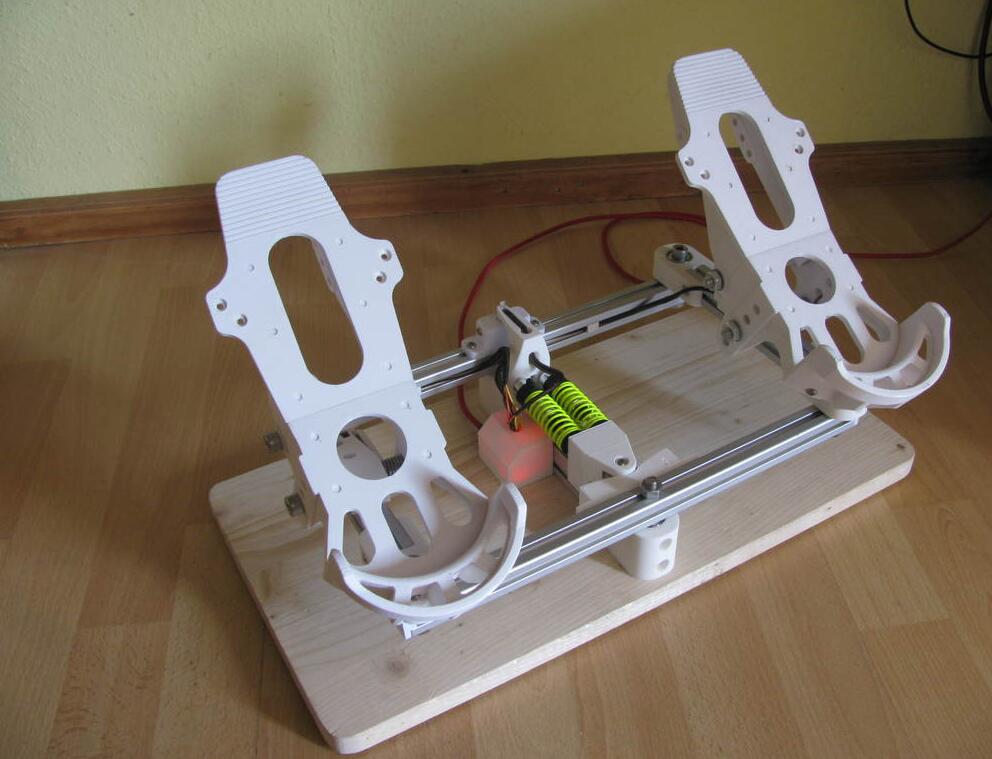
我的赛特克(Saitek)踏板数次出现故障,而且更高质量的踏板对我来说太贵之后,我决定设计自己的一套方向舵踏板。
如果您想制作自己的模拟飞行脚舵,请务必阅读提供的BOM表和说明。pdf格式。
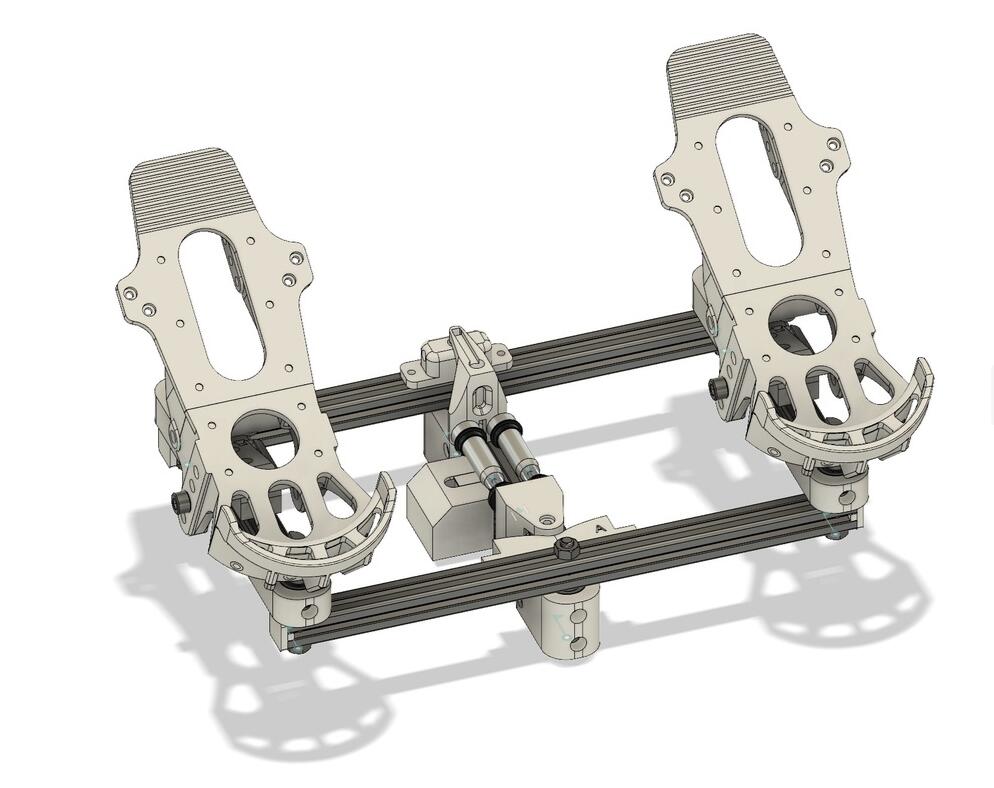
整个系统由基本部件构成:2020挤压件、608ZZ滚珠轴承、M4、M5和M8螺钉。
唯一的非标准零件是脚趾制动器的扭转弹簧,但是如果你有台钳和钳子,你可以很容易地自己制造弹簧。
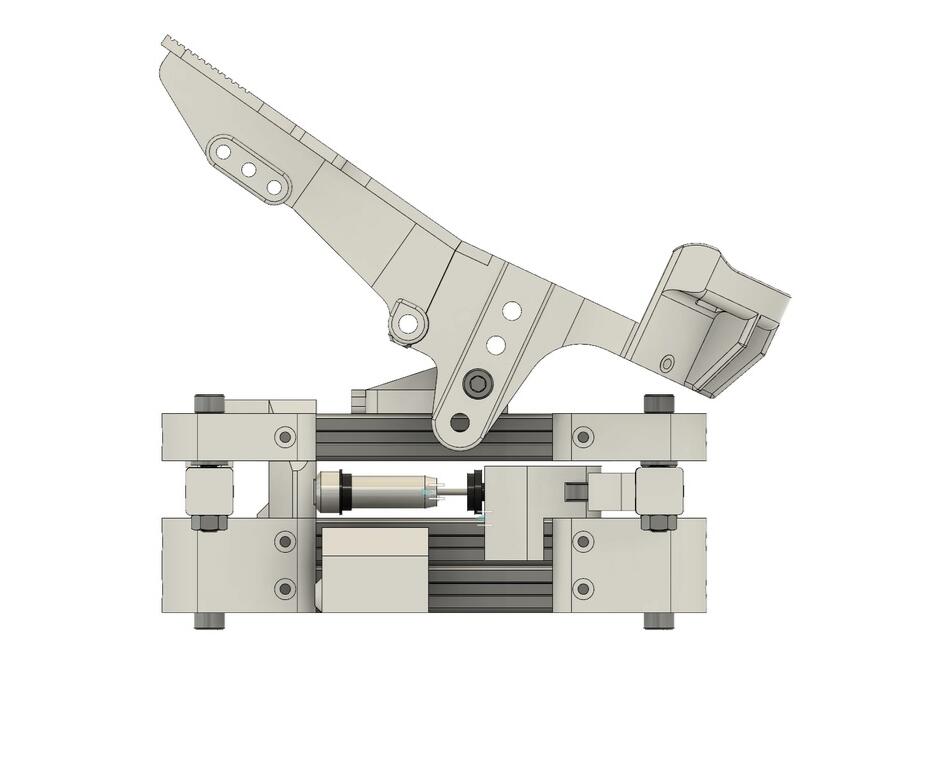
重新定心机构由RC汽车减震器组成,将线性滑块上的滚珠轴承推到凸轮表面上。可通过使用更强的弹簧、改变弹簧预载、为减震器使用更厚的机油或使用不同类型的凸轮来调整踏板的行为。
有3个霍尔效应传感器,一个用于偏航轴,一个用于每个前制动轴,它们连接到基于ATmega32u4的Arduino Pro Micro,校准过程后,所有校准值直接存储到EEPROM。
随附Fusion360文件,可根据您的需要修改零件:
-踏板最终v12。f3d:整个组件
-踏板滑块v1。f3d:滑块只是一个单独的文件,便于调整
-旧版本的踏板。f3d:第一次尝试
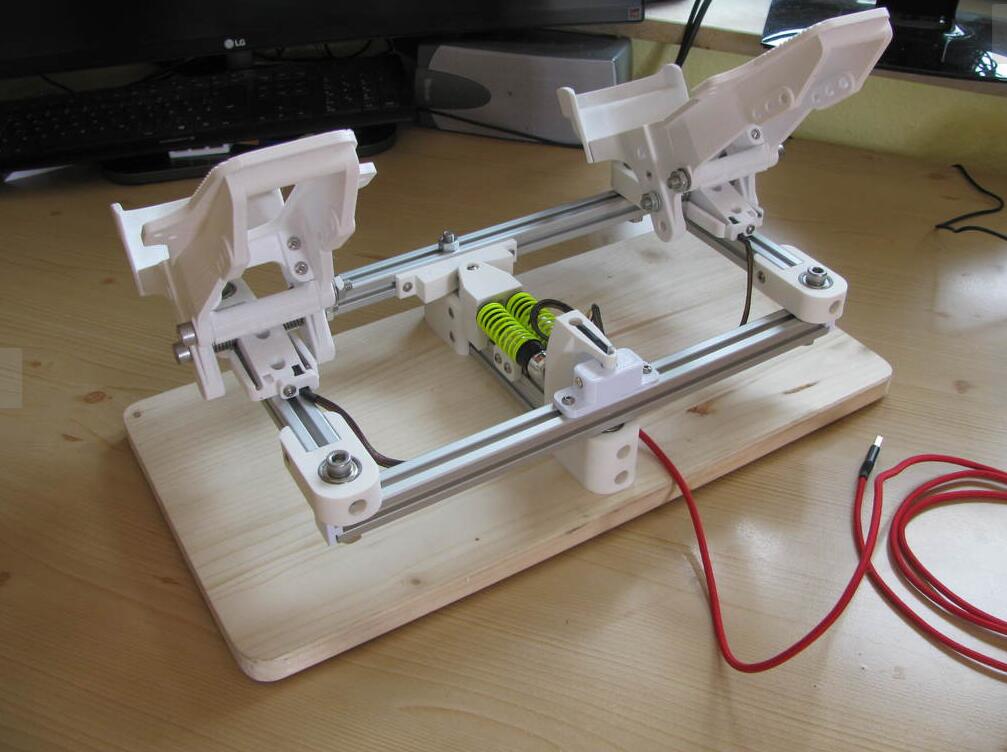
我的第一次尝试是设计了一个类似于MFG侧风踏板的重新定心机构,弹簧加载杆将轴承推到凸轮表面上。
然而,这一体系有几个缺点:
轴承沿圆形路径移动,从而导致不对称行为。
印刷的杠杆太弱和灵活。
没有减震器,踏板弹性太大。
带有线性滑块的版本工作得更好,但也许有人会发现旧版本的用处。
编辑19.06。20:增加踏板最终v13。步
编辑02.10。20:增加了“滑块28mm_修改的.stl”和“传感器支架28mm_修改的.stl”,允许使用更大的减震器
作品