请选择一个新照片进行上传编辑。
头像保存后,您可能需要刷新一下本页面(按F5键),才能查看最新的头像效果
热度 1 |
摘要
对有人/无人机协同作战指挥控制(Command and Control, C2)系统技术问题开展研究. 总结了有人/无人机协同作战验证项目试验情况, 并分析了协同作战体系组成、C2结构和复杂性. 结合作战特点和任务需求, 提出了包括计算通信层、协同控制层和规划决策层的递阶式C2系统结构. 根据决策粒度差异, 划分了编组、编队和单机三层决策层次, 分析了决策模块中的决策模式优选与跃迁、辅助决策和人机协同等关键技术, 并对未来研究方向进行了展望.
新军事变革背景下,战争形态将按照机械化→信息化→智能化的图景次第展开[1]。当前,我军空中作战装备仍然以有人机(Manned Aerial Vehicle, MAV)为主,相比于有人机,无人机(Unmanned Aerial Vehicle, UAV)具有战术实现灵活、持续作战能力强、平台成本低的显著优势,必将在未来空中作战中发挥越来越重要的作用[2]。
依赖于“分布式作战”、“蜂群作战”和“马赛克战”等作战理论牵引[3-5],以及态势感知技术、智能决策技术、协同控制技术和通信网络技术的不断发展,未来空中联合作战体系将向“有人机与无人机协同作战”(以下称为“有人/无人机协同作战”)、“全无人机协同作战”的方向发展。
在实际作战中,无人机并不能完全替代有人机。将有人机和无人机构成混合作战体系,通过协同态势感知、协同作战决策、协同火力打击及协同毁伤评估,实施从“传感器”到“射击器”的一体化作战行动:无人机作为作战执行者,能够前置战场空间,实时掌握前沿战场信息,突前执行枯燥、恶劣、危险和纵深(Dull, Dirty, Dangerous and Deep, 4D)任务;有人机作为作战管理者,在一定战场空域实施对整个作战行动的监督控制,并在必要时对无人机实施计算、信息、决策、火力支援或进行战术协同。这种作战模式实现了有人机与无人机的能力互补、优势集成,具有广泛的作战应用前景[6]。
1
有人/无人机协同作战发展
根据美国空军对自主控制等级(Autonomous Control Level, ACL)的定义[7],无人机自主控制等级被分为10级,从低到高分别对应非自主、单机自主、多机自主和集群自主。然而,任何一种作战理念从概念提出到实践落地的过程都不是一蹴而就的,无人机的完全自主在短期内难以实现。目前,美军典型现役无人机中,MQ-1“捕食者”的ACL为2级,RQ-4“全球鹰”和RQ-8“火力侦察兵”的ACL为3级,MQ-9“收割者”的ACL为3~4级。此外,由于有人机指挥员的操控和指挥,能够发挥指挥员的作战智慧和经验,有人机在空中作战中仍然十分重要。如图1所示,为不同自主控制等级下的无人机功能架构。
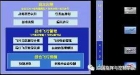
图1 不同自主控制等级下的无人机功能架构
Fig. 1 UAV functional architecture under different ACL
2014年,为应对主要战略对手军事发展并保持自身军事优势,美国提出“第三次抵消战略”,并指出其中五大重点发展领域[8]:自主学习技术、人机协作技术、机器辅助人类作战技术、先进有人/无人编队技术、网络使能武器技术。可以看到,有人/无人机协同作战是美军未来作战优先发展选项。
事实上,至早追溯到20世纪90年代末期,美国、英国和法国等国就开展了有人/无人机协同作战演示验证工作。
1996年,美国陆军航空与导弹研究、研发与工程中心开展了“机载有人/无人系统技术”(Airborne Manned-Unmanned System Technology, AMUST)研究[9],开发作战管理所需的软件和程序,有人机(AH-60D“长弓阿帕奇”直升机)利用作战管理软件,通过战术通用数据链对无人机(“无人小鸟”)进行载荷控制和飞行控制,初步实现有人机与无人机间的互联互通互操作。
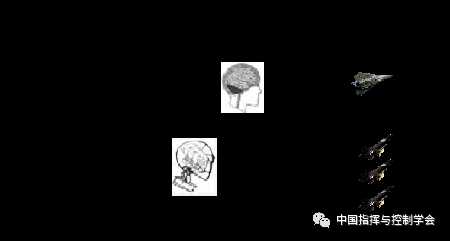
2004年,美国国防部高级研究计划局(Defense Advanced Research Projects Agency, DARPA) 和美国空军开展软件使能控制(Software Enabled Control, SEC)项目研究[10],由有人机(F-15E“攻击鹰”战斗机)和无人机(T-33攻击机)协同执行目标信息收集任务,有人机通过语音控制无人机飞行,以保证无人机对突发威胁的及时准确响应。如图2所示,为SEC项目试验想定。

图2 SEC项目试验想定
Fig. 2 Test scenario of SEC project
2012年,美国海军提出“通用控制系统”(Common Control System, CCS)项目,该系统能够支持美国海军进行有人平台指挥无人机执行情报、监视和侦察任务,由于采用了开放式软件架构,系统对多类型无人系统均具有集成能力,有效降低了开发和维护成本。
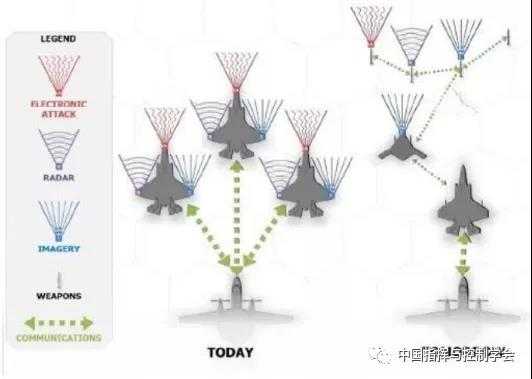
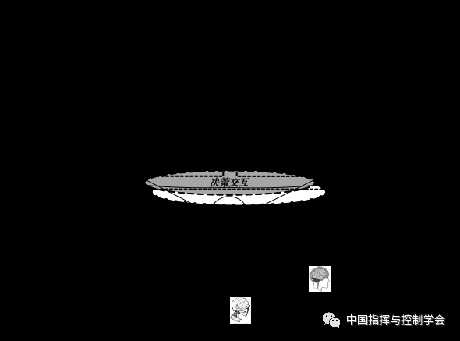
2014年,DARPA开展了“体系综合技术和试验”(System of System Integration Technology and Experimentation, SoSITE)项目研究[11],其采用开放式体系架构技术,基于载荷和平台分离思想,使关键功能载荷(作战管理、侦察、通信、电子战和攻击等)能即插即用于各类无人航空平台,通过分布式感知、分布式决策、分布式控制和分布式攻击,实现分布式空战效果。如图3所示,为SoSITE项目试验想定。

图3 SoSITE项目试验想定
Fig. 3 Test scenario of SoSITE project
2017年3月,美国洛克希德·马丁公司和美国空军开展最新一轮“忠诚僚机”项目,将F-16试验机改装成自主或半自主无人作战飞机,与F-35战斗机共同构成长、僚机编组,主要完成3方面演示验证:一是基于任务优先级和可用作战资源,僚机自主规划生成作战攻击任务方案并自主执行;二是通过长机座舱内的指挥员与飞行器接口,将指挥员作战意图快速准确翻译为机器语言,并发送至僚机进行执行,实现高效人机交互;三是针对僚机任务执行过程中的突发事件,由长、僚机采用协同决策方式,实现对战场突发事件的自主适应。
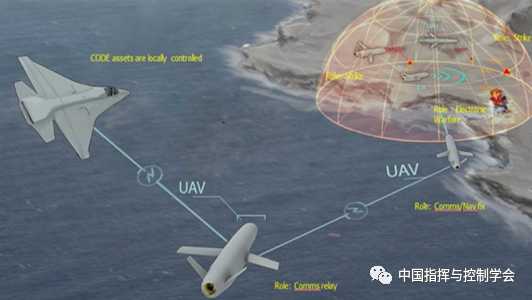
2018年1月,美国雷声公司受领DARPA“拒止环境中协同作战”(Collaborative Opera-tions in Denied Environment, CODE)项目第3阶段(全任务阶段)合同,该项目旨在提升未来美军在电子干扰、通信受限及其他恶劣作战环境中的协同作战能力,通过开展单无人机自主、无人机编队自主、开放式系统架构和智能人-机接口等关键技术验证,实现通信受限条件下侦察/打击任务分配和编队自主协同控制。如图4所示,为CODE项目试验想定。

图4 CODE项目试验想定
Fig. 4 Test scenario of CODE project
国外进行的有人/无人机协同作战相关演示验证还包括:1)2005年,DARPA主持了“通用作战系统”(Common Operating System, COS)项目研究,综合验证了地面控制站、有人机、无人机和天基通信平台的互联互通能力;2)2007年,英国奎奈蒂克公司将“狂风”战斗机作为有人机,改进BAC1-11作为无人机,通过“基于智能体推理”(Agent-based Reasoning, ABR)软件实现了有人机指挥控制(Command and Control, C2)下多无人机对地面运动目标的模拟攻击;3)2014年,由法国牵头,其他5个欧洲国家(意大利、西班牙、希腊、瑞典和瑞士)参与制造的“神经元”(nEUROn)无人机与“阵风”战斗机、“隼”7x商业飞机进行了数百公里的编队飞行,对有人/无人机编队飞行过程中对电子干扰、大气湍流的抗干扰性能进行了相关验证;4)2016年,DARPA推出“驾驶舱内自动化系统”(Aircrew Labor In-cockpit Automa-tion System, ALICAS)项目,旨在通过引入全自动声控、触控驾驶系统,实现有人机C2下无人机起飞、巡航和降落阶段的自动感知避障;5)2016年和2018年,美国空军研究实验室代表DARPA分别授予洛克希德·马丁公司和BAE系统公司“分布式作战管理”(Distributed Battle Management, DBM)第二阶段和第三阶段合同,以验证美军在未来拒止作战环境中的协同作战能力,通过将决策辅助软件分布式部署在无人机上,保证通信受限条件下的持续任务执行能力。
得益于无人机自主和协同控制能力的提升,有人机C2方式正逐步从“人在回路中”转变为“人在回路上”,使指挥员能够从底层的飞行和编队控制中抽离出来,降低工作负荷,从而更加专注于高层任务控制[12]。按照从底到顶的逻辑顺序,有人/无人机协同作战C2是涉及计算、通信、控制和决策的完整体系,需要进行相应分析。
2
有人/无人机协同作战C2分析
2.1 协同作战体系组成分析
一般情况下,有人/无人机协同作战体系主要包括指挥中心、有人机、无人机和通信链路。
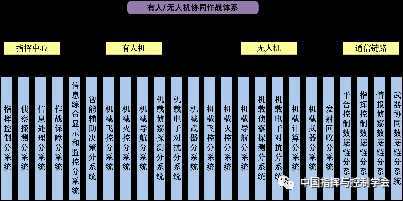
其中,通信链路为指挥中心、有人机和无人机提供平台状态信息、战场态势信息和C2信息等各类信息的传输与共享通道,是指挥中心、有人机和无人机间的有效链接,保证各类信息的高效流转;指挥中心通常部署于空中、海上或陆上,利用其强大态势感知和指挥控制能力,对多个有人/无人机作战编组进行指挥控制;有人机对本编组内无人机进行指挥控制,负责编组内作战任务执行的监督控制,并在必要时提供相应支援或直接进行战术协同,从而保证作战任务的有效执行;无人机深入战场前沿,负责接收来自指挥中心和有人机的C2命令,并完成编组内作战任务的具体执行和效果反馈。如图5所示,为协同作战体系组成。

图5 有人/无人机协同作战体系组成
Fig. 5 System composition of MAV/UAV cooperative operation
指挥中心包括指挥控制分系统、侦察探测分系统、信息处理分系统和作战保障分系统等;有人机包括信息综合显示和监控分系统、智能辅助决策分系统、机载飞控分系统、机载火控分系统、机载导航分系统、机载侦察探测分系统、机载电子对抗分系统、机载武器分系统等;无人机包括机载飞控分系统、机载火控分系统、机载导航分系统、机载侦察探测分系统、机载电子对抗分系统、机载计算分系统、机载武器分系统、发射回收分系统等;通信链路包括平台控制数据链分系统、指挥控制数据链分系统、情报侦察数据链分系统、武器协同数据链分系统等。协同作战体系中各组成单元在功能划分上各不相同,具体如下。
1)指挥中心功能:在作战保障分系统的作战保障下,利用侦察探测分系统收集初始战场态势信息,并经信息处理分系统进行信息处理,随后通过指挥控制分系统生成相应决策指令,最后通过通信链路,向协同作战编组分发相关态势信息和决策指令,实现相应的态势信息支援和指挥引导。
2)有人机功能:在指挥中心的态势信息支援和指挥引导下,利用机载侦察探测分系统和机载电子对抗分系统,为无人机提供实时态势信息支援和对敌电子干扰支援;有人机指挥员通过信息综合显示和监控分系统,对无人机飞行状态和任务执行情况进行实时监控,并在特定C2结构下,利用智能辅助决策分系统完成平台编成与任务执行计划生成/调整、动态决策分配、协同攻击决策等决策结果生成;在无人机火力资源无法完成目标攻击时,有人机利用机载武器分系统和机载火控分系统,对无人机提供火力支援,并且在必要时,有人机对无人机的发射武器进行他机制导。
3)无人机功能:利用机载飞控分系统和机载导航分系统完成多无人机编队的任务集结、编队控制等;利用机载侦察探测分系统、机载电子对抗分系统、机载火控分系统、机载武器分系统完成指定任务区域的侦察、跟踪、电子对抗和协同攻击等;在特定C2结构下,利用机载计算分系统完成平台编成与任务执行计划生成/调整、动态决策分配、协同攻击决策等决策结果生成需要进行的各类解算。
4)通信链路功能:利用所配置的各类数据链通信、卫星通信和激光通信分系统,完成平台状态信息、情报保障信息、C2信息和攻击指令信息在协同作战系统内部的实时/准实时交互,为作战行动提供可靠信息保障,实现信息共享基础上的作战协同。
2.2 协同作战C2结构分析
有人/无人机协同作战过程中,为了实现平台作战能力有效组合、充分补益、自发涌现,要求协同作战C2具有一定敏捷性,即作战C2具有鲁棒性、可靠性和适应性。结构决定功能[13],协同作战C2结构在一定程度上决定了协同作战体系作战效能的发挥。从结构分类上看,有人/无人机协同作战C2结构分为集中式、分布式和混合式结构。
2.2.1 集中式C2结构
集中式C2结构是指,体系中存在中央控制节点(一般为有人机)进行统一的作战指挥,各无人机将侦察探测信息和平台状态信息发送至有人机,有人机经过统一决策后,将决策结果以指令形式发送给无人机执行。如图6所示,为有人/无人机协同作战集中式C2结构。

图6 集中式C2结构
Fig. 6 Centralized C2 structure
集中式C2结构具有网络结构简单、便于集中管理、易于全局优化的优点,但仍然存在以下几点不足:1)由于有人机需要掌握所有受控节点的状态和探测信息,因此,对有人机与无人机间的通信链路带宽和可靠性要求较高。2)无人机与有人机之间存在一定通信延迟,导致前沿部署的无人机难以实时响应战场态势变化。3)计算、信息、决策均集中于有人机,对于大规模作战体系而言,求解复杂度较高。4)作战体系鲁棒性不足,有人机出现损毁或故障会影响整体作战效能。
2.2.2 分布式C2结构
与集中式C2结构将计算、信息、决策等功能集中于有人机不同的是,分布式C2结构将信息、计算、决策等功能分散到各无人机,将复杂问题分解为各无人机处理的简单子问题。无人机采用自治+协作方式,通过局部协商机制完成对全局问题的优化求解。如图7所示,为有人/无人机协同作战分布式C2结构。

图7 分布式C2结构
Fig. 7 Distributed C2 structure
相比于集中式C2结构,分布式C2结构具有如下优点:1)无人机能够快速获取环境信息和状态信息,而无需时时向有人机上报相关信息,有效减少了指挥层级,能够实现对战场态势变化的快速响应。2)各无人机充分发挥信息、计算、决策“能动性”,有效降低了有人机的C2负载,使其能够专注于高层任务控制。3)各无人机之间采用基于网络化通信的决策结果协商机制,只对高层协作信息进行共享,大大降低了对通信带宽的需求。4)各无人机作为作战网络中的节点,单节点的损毁或故障不会影响体系性能,且作战节点出、入网便捷,作战体系的鲁棒性、伸缩性较好。
尽管分布式C2结构相比于集中式C2结构而言优点较多,但仍然存在一定缺陷。具体地,由于分布式决策结果的生成需要多轮协商,决策效率相对集中式C2结构不高;此外,由于分布式C2结构在决策过程中涉及多架无人机之间的协商,得到的可能是各方满意的均衡解,因此,解的全局最优性在一定程度上难以保证。
2.2.3 混合式C2结构
分布式C2结构在鲁棒性、伸缩性和通信需求方面存在优势,集中式C2结构在决策效率和决策质量方面存在优势。
随着无人机自主水平的不断提高,未来有人/无人机协同作战C2结构将更趋分布,但当前的自主水平难以实现完全自主,无人机在态势感知与认知、任务决策与控制等方面的能力与有人机指挥员仍然存在一定差距,指挥员仍然是有人/无人机协同作战C2的关键。
因此,为实现无人机有限自主决策能力和有人机指挥员人类决策能力的优势互补,提高作战系统鲁棒性、伸缩性,提高作战体系决策效率和决策质量,并降低作战体系通信负载,可以考虑综合集中式C2结构和分布式C2结构各自优长,采用混合式C2结构。如图8所示,为有人/无人机协同作战混合式C2结构。
图8 混合式C2结构
Fig. 8 Hybrid C2 structure
混合式C2结构中,有人机和无人机共同参与决策,按照决策主导者的不同可以分为有人机主导型混合式决策和无人机主导型混合式决策,按照混合程度的不同可以分为建议、干预、知会型混合式决策。
在有人/无人机协同作战混合式C2结构中,有人机与无人机构成多个作战编组,各有人/无人机编组的平台组成及作战任务由指挥中心确定,指挥中心负责对有人/无人机编组进行战场指挥控制,开展全局决策;在各有人/无人机编组内部,由有人机对配属无人机进行战术级指挥控制,开展局部决策。无人机通过机载传感器获取战场情报数据,在编组内各无人机之间进行情报共享,各无人机进行情报数据融合后形成战场态势上报有人机;有人机指挥员通过智能辅助决策系统对编组内无人机执行任务情况进行监督控制,无人机采用自主分布式协商机制进行决策,有人机仅在需要时收回决策权。
因此,混合式C2结构中的“混合”,包括时间和空间上两层含义,从时间上看,“混合”是指时而集中、时而分布,从空间上看,“混合”是指底层分布、上层集中。采用混合式C2结构也为可变自主决策的实现提供了基础,有人机能够基于无人机所能达到的最高决策等级,根据战场态势需要对无人机进行动态赋权,从而最大程度地实现体系柔性。
2.3 协同作战C2复杂性分析
有人/无人机协同作战构成感知、决策、行动、评估环,从C2角度看,主要涉及指挥中心对有人/无人机协同作战体系的C2和有人机对无人机的C2。协同作战过程中,作战环境开放复杂、动态变化,作战任务广域分布、高度耦合,作战平台类型众多、能力异构,协同关系内容多维(时间协同、空间协同、任务协同)、多域交叉(物理域、信息域、认知域交叉)。因此,有人/无人机协同作战过程是一个存在非线性、非平衡、非简约等作用机制,包含随机性、模糊性、区间性等多重不确定性的复杂过程。具体来说,有人/无人机协同作战C2具有以下复杂性。
1)作战环境复杂性。有人/无人机协同作战体系面临的是强对抗性、非结构化战场环境,战场态势处于实时变化状态,需要协同作战体系作出实时(准实时)反应。
2)作战任务复杂性。对不同敌方目标涉及侦察、打击、评估等不同作战任务,不同作战任务在资源需求、时序约束等方面差异明显,使得任务决策空间复杂高维;同时,平台失效、目标变更、突发威胁、无人机自主攻击决策困难等突发事件间或发生,对作战计划临机调整的时效和质量要求较高。
3)作战平台复杂性。有人机平台价值高,属于优先保护平台,且当前对无人机指挥控制的人机比仍然较高,单架有人机能够指挥控制的无人机数量有限,存在指挥控制容量阈值;无人机数量众多,传感器和武器等资源类型各异,不同资源工作模式各不相同(传感器资源的成像方式、武器资源的攻击距离等),使得执行同一任务的不同无人机对战场态势的感知与理解、作战任务效果各不相同。
4)指挥员人因复杂性。有人/无人机协同作战过程中,有人机指挥员负责对所属作战编组的指挥控制提供人的决策,但指挥员作为“有限理性”的决策者,其决策方式必定不同于计算机的“非此即彼”式决策,而是具有独特的决策习惯和偏好;同时,指挥员需要完成的任务类型众多,主要包括操控、认知、决策、监督和干预等,较大的工作负荷会影响指挥员工作效能的发挥。
5)计算/通信复杂性。有人/无人机协同作战体系中要素众多、关系复杂、交互频繁,较难采用线性化、规律性方法进行完整统一建模与描述,且随着个体数量的增长,问题求解空间出现组合爆炸现象,给机载计算的时效性和准确性带来较大挑战;同时,平台高速运动易导致网络拓扑动态、网络带宽受限、网络时延较大等现象,对高度依赖信息共享的指挥控制造成较大困难。
作战环境复杂性、作战任务复杂性、作战平台复杂性、指挥员人因复杂性和计算/通信复杂性等多种复杂性相互交织,使得有人/无人机协同作战C2极具挑战性。传统集中式C2结构,虽然具有较高的决策效率,但在面对动态战场态势时显得过于刚性,难以实现对动态战场态势的自适应,进而影响作战决策的自组织,最终阻碍作战行动的自同步。
3
协同作战C2系统
基于对有人/无人机协同作战体系组成、C2结构和C2复杂性的分析,要求必须考虑作战任务的层次性,指挥中心、有人机和无人机的功能层次性,以及C2系统自身层次性特点,构建具有层次划分、层内关联、层间耦合的有人/无人机协同作战C2系统,从而有效应对各个层次内的不同复杂性挑战。
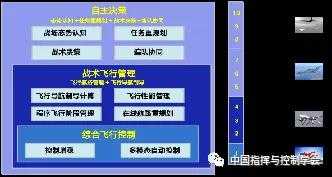
有人/无人机协同作战C2系统包括3层,从底层到顶层分别是计算通信层、协同控制层和规划决策层[14]。其中,计算通信层主要提供航空计算、机载通信和节点组网等功能;协同控制层主要提供飞行控制、队形控制和集结控制等功能;规划决策层主要提供决策模式优选与跃迁、辅助决策与人机协同、航路规划、行动规划和兵力规划等功能。如图9所示,为有人/无人机协同作战递阶式C2系统结构。

图9 递阶式C2系统结构
Fig. 9 Hierarchical C2 system structure
在有人/无人机协同作战递阶式C2系统中,对计算通信层、协同控制层和规划决策层中规划技术的相关研究成果较多,而规划决策层中的决策问题有其自身所特有的运行模式和演化规律:作战体系的层次结构、人因因素,战场态势的复杂、不确定和动态特性,作战能力的不可简约、自发涌现,要求采用区别于传统有人机协同作战和未来全无人机协同作战的研究范式开展相关研究。
有人/无人机协同作战决策涉及参战平台、作战任务、决策内容众多,且耦合关系复杂,若采用一体化设计方法,则会导致问题规模过大而影响决策效率和决策质量。
因此,建立有人/无人机协同作战决策体系架构,主要包括编组层、编队层和单机层,编组层和编队层对应作战使命和任务。随着决策粒度的不断细分,大规模复杂作战问题被分解为多层简单问题,通过对多层简单问题的高效求解,实现问题解耦。如图10所示,为有人/无人机协同作战决策层级模型。

图10 决策层级模型
Fig. 10 Decision-making hierarchy model
从图10可以看出,编组层主要由指挥中心、有人机指挥员和编组决策支持系统构成的编组决策系统共同完成使命分解、平台匹配和执行调度等编组层决策,编队层主要由有人机指挥员和编队决策支持系统构成的编队决策系统共同完成任务计划、攻击决策和执行调度等编队层决策,平台层主要由无人机自主决策系统完成任务计划、攻击决策和载荷运用等平台层决策。在此过程中,编组层与编队层、编队层与平台层之间进行按级任务协同,而编组层和平台层之间进行越级任务协同。
4
协同作战C2技术
有人/无人机协同作战决策过程是涉及指挥员人的决策、有人机辅助决策和无人机有限自主决策的人类智能和机器智能融合的决策大系统,如何充分发挥三者优势,协调三者之间的决策关系,是有人/无人机协同作战需要迫切解决的重大问题。
4.1 决策模式优选与跃迁技术
有人/无人机协同作战过程中,需要采用决策模式优选与跃迁技术合理确定指挥员和自动化系统之间的决策模式,确保自动化系统以合适的自动化等级辅助指挥员决策,并在条件变化时,进行决策模式调整。
如图11所示,为决策模式优选流程。该流程中,指挥员工作负荷、通信链路状况、环境不确定性程度、任务紧迫程度和指挥员信任度等五要素构成属性域;在专家域中,专家根据其经验和知识,给出专家建议决策矩阵,并经过一致性检验生成群体决策矩阵;对参考序列和群体决策矩阵进行关联度计算后,结合权重域中权重向量,生成关联度矩阵;最后,根据关联度矩阵取值情况,在集中式决策、交互式决策和分布式决策3种决策模式中选取适宜决策模式。

图11 决策模式优选流程
Fig. 11 Optimized selection process of decision-making mode
由于自身、对手和环境的动态特性,影响决策模式选取的属性值会随着作战进程而发生较大幅度的波动。因此,决策模式并不会恒定不变,而会随着属性值的变化而动态跃迁。同时,为避免决策模式的盲目跃迁,需要合理控制决策模式跃迁的灵敏度,根据属性值变化的类型、幅度和频率,决定决策模式是否跃迁,以及跃迁方式。
如图12所示,为决策模式跃迁示例[15]。在跃迁过程中,主要基于最小变更原则,即当前后两次决策模式效用值相差不大,不超过一定阈值时,不进行决策模式的跃迁,从而保持有人/无人机决策模式的总体稳定。

图12 决策模式跃迁示例
Fig. 12 Example of decision-making mode transition
4.2 辅助决策技术
辅助决策系统为有人机指挥员实施有人/无人机协同作战决策提供支撑,其核心是辅助指挥员进行作战态势认知理解的基础上,进行编队组织、任务分配和攻击决策等。
辅助决策系统由人工认知单元(Artificial Cognitive Unit, ACU)、自解释模块(Self Explanatory Module, SEM)、数据库(Data Base, DB)、知识库(Knowledge Base, KB)、模型库(Model Base, MB)和方法库(Solution Base, SB)等组成[16]。
如图13所示,为辅助决策系统模块。ACU模块主要完成自动化系统自主决策以及决策结果交互,SEM模块将辅助决策系统对于无人机的C2协同行为解释为指挥员可理解及可信行为,DB模块存储各类决策信息,KB模块存储各类专家知识,MB模块存储各项可量化决策内容的决策模型,SB模块存储求解决策模型的各类决策方法。

图13 辅助决策系统模块
Fig. 13 Assistant decision-making system module
4.3 人机协同技术
在有人/无人机协同作战C2系统设计中,需要提供一定技术手段,采用人机协同技术,实现人机智能融合。
图14是以对敌方目标攻击行动为例下的人机协同架构。该架构中,无人机层面主要进行信息汇聚和决策推理,信息汇聚是对本地状态信息、外部环境信息和攻击目标信息进行收集和处理;决策推理是基于各类信息进行态势推理,主要包括攻击优势评估和威胁程度评估,并生成最终自主攻击决策结果;有人机层面是指挥员在智能辅助决策分系统辅助决策下,实现对无人机的监督控制。通过无人机自主决策和有人机(指挥员)监督控制,实现人机决策交互。

图14 人机协同架构
Fig. 14 Human-machine collaborative architecture
由于人机决策优势和特点的不同,要求人机采用不同的决策机制。在对敌方作战目标攻击过程中,无人机主要采用推理(如混合模糊认知图)方法,进行目标攻击自主决策,包括武器检测和态势估计2个模块。
如图15所示,为无人机攻击决策推理示意图。在武器检测模块,主要是根据武器动力状态、武器火控状态、武器制导状态和武器战斗部状态等挂载状态,生成攻击条件状态,并作为态势估计模块的输入;在态势估计模块,由天气情况、地形情况、电磁环境情况、目标雷达状态、目标防护能力、相对速度优势和相对距离优势推理生成我方攻击优势,由天气情况、地形情况、目标雷达状态和目标防护能力推理生成敌方威胁程度,并基于我方攻击优势和敌方威胁程度推理生成态势综合值。

图15 无人机攻击决策推理
Fig. 15 UAV attack reasoning
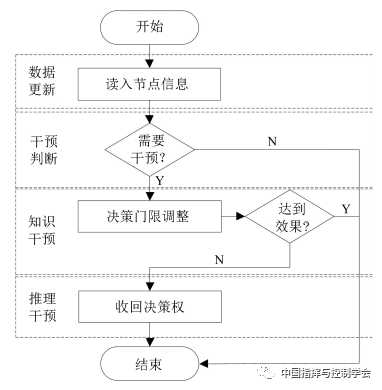
当无人机由于自主性水平差异出现决策困难状态时,则由有人机(指挥员)进行干预,主要包括知识干预和推理干预两种,干预强度依次增强。如图16所示,为有人机(指挥员)干预转进策略。
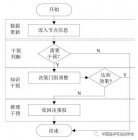
图16 干预转进策略
Fig. 16 Intervention transfer strategy
该策略中,首先进行数据更新并判断是否需要干预,若是,则进行知识干预并判断干预效果,若未达到干预效果,则进行推理干预。具体而言,知识干预是指对决策门限进行调整,推理干预是指改变人机协同方式,指挥员收回决策权,根据作战智慧和经验,修正无人机决策结果或直接给出决策结果。
5
协同作战C2系统技术研究展望
1)构建有人/无人机知识服务体系
知识更加贴近决策和行动,其作用是实现信息与决策、行动的交联,促进个体认知水平提高和群体认知趋同,并有效提高智能C2水平。下一步需要构建有人/无人机协同作战知识分类体系,对领域知识进行建模表示,建立知识服务运作机制[17]。
2)实现作战单元变权限指挥控制
有人/无人机协同作战涉及到指挥中心对有人机和无人机编队的指挥控制、有人机对无人机的指挥控制和无人机的自主控制等,要实现协同作战,关键要解决控制权限在多个C2单元之间无缝、连续、稳定的转换和迁移,根据不同任务需求和C2单元能力,实现变权限指挥控制。
3)引入指挥员决策人因因素影响
有人/无人机协同作战过程中,指挥员负责对整个作战编队的监督控制,对其态势认知、决策要求较高,系统需要适时监督指挥员生理和心理状态数据,考虑指挥员决策习惯和偏好,引入指挥员人因因素,使得模型更加符合实际[18-19]。
References
1 蔡明春, 吕寿坤. 智能化战争形态及其支撑技术体系 [J]. 国防科技, 2017, 38(1): 94-98.
CAI M C, LYU S K. Preliminary probing into intelligent warfare and it supporting technology system[J]. Nation-al Defense Science & Technology, 2017, 38(1): 94-98.
2 VALENTI M, SCHOUWENAARS T, KUWATA Y, et al. Implementation of a manned vehicle-UAV mission system[C]// Proceedings of AIAA Guidance, Navigation, and Control Conference, Proridence, Rhode Isand, U.S., 2004: 198−199.
3 时东飞, 蔡疆, 黄松华, 等. 美国空军“战斗云”作战理念及启示[J]. 指挥信息系统与技术, 2017, 8(3): 27-32.
SHI D F, CAI J, HUANG S H, et al. Operational concept and enlightenment of united states air force combat cloud[J]. Command Information System and Technology, 2017, 8(3): 27-32.
4 钮伟, 黄佳沁, 缪礼锋. 无人机蜂群对海作战概念与关键技术研究[J]. 指挥控制与仿真, 2018, 40(1): 20-27.
NIU W, HUANG J Q, MIU L F. Research on the concept and key technologies of unmanned aerial vehicle swarm concerning naval attack[J]. Command Control & Simulation, 2018, 40(1): 20-27.
5 向南, 豆亚杰, 姜江, 等. 马赛克战概念下作战模块应急重构自主决策[J]. 指挥与控制学报, 2020, 6(3): 223-228.
XIANG N, DOU Y J, JIANG J, et al. Autonomous emergency decision-making of combat module under mosaic warfare[J]. Journal of Command and Control, 2020, 6(3): 223-228.
6 United States Department of Defense. Unmanned systems integrated roadmap FY2017-2042[R]. Washington DC, U.S.: United States Department of Defense, 2018.
7 范彦铭. 无人机的自主与智能控制[J]. 中国科学: 技术科学, 2017, 47(3): 221-229.
FAN Y M. Autonomous and intelligent control of the unmanned aerial vehicle[J]. Scientia Sinica Techno-logica, 2017, 47(3): 221-229.
8 ROBERT M. Toward a new offset strategy: exploiting U.S. long-term advantages to restore U.S. global power projection capability[R]. Washington DC, U.S.: Center for Strategic and Budgetary Assessments (CSBA), 2014.
9 BALINDA M, MARK E, ROBERT Y, et al. Hunter standoff killer team (HSKT) ground and flight test results [C]// Proceedings. of SPIE, Defense Transformation and Net-Centric Systems, Orlando, Florida, U.S., 2007.
10 TARIQ S, GARY B. Software-enabled control: information technology for dynamical systems [M]. Piscataway: Wiley-IEEE Press, 2005.
11 蒋琪, 葛悦涛, 张冬青. “动态”与“分布”-空中力量建设的“新”方向[J]. 航天电子对抗, 2016, 32(1): 4-7.
JIANG Q, GE Y T, ZHANG D Q. Dynamic and distributing: a new direction of the development of air-surface warfare[J]. Aerospace Electronic Warfare, 2016, 32(1): 4-7.
12 BINDEWALD J M, MILLER M E, PETERSON G L. A function-to-task process model for adaptive automation system design[J]. International Journal of Human-Computer Studies, 2014, 72(12): 822-834.
13 GUERRERO G, LANGA J A, SUAREZ A. Architecture of attractor determines dynamics on mutualistic complex networks[J]. Nonlinear Analysis Real World Applications, 2017, 34: 17-40.
14 吴立尧, 韩维, 张勇, 等. 有人/无人机编队指挥控制系统结构设计[J]. 系统工程与电子技术, 2020, 42(8): 1826-1834.
WU L Y, HAN W, ZHANG Y, et al. Structure design of command and control system for manned/unmanned aerial vehicle formation[J]. Systems Engineering and Electronics, 2020, 42(8): 1826-1834.
15 王勋, 张杰勇, 万路军, 等. Holonic-C2组织决策分配及演化方法[J]. 国防科技大学学报, 2020, 42(6): 157-166.
WANG X, ZHANG J Y, WAN L J, et al. Holonic-C2 organization decision allocation and evolution method[J]. Journal of National University of Defense Technology, 2020, 42(6): 157-166.
16 BENJAMIN L, AXEL S. Self-explanation capability for cognitive agents on-board of UCAVs to improve cooperation in a manned-unmanned fighter team[C]// Proceedings. of AIAA Guidance, Navigation, and Control Conference. Boston, MA, U.S., 2013.
17 赵瑜, 陈志坤, 杨春. 基于开源数据的军事领域知识图谱构建方法[J]. 指挥信息系统与技术, 2019, 10(3): 64-69.
ZHAO Y, CHEN Z K, YANG C. Construction method of military domain knowledge graph based on open source data[J]. Command Information System and Technology, 2019, 10(3): 64-69.
18 ZHONG Y, YAO P Y, WAN L J, et al. Intervention decision-making in MAV/UAV cooperative engagement based on human factors engineering[J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 530-538.
19 浦同争, 何敏, 宗容, 等. 基于改进CREAM的无人机操作员人因可靠性分析[J]. 指挥与控制学报, 2019, 5(3): 236-242.
PU T Z, HE M, ZONG R, et al. Analysis of human reliability on unmanned aerial vehicle operators based on improved CREAM[J]. Journal of Command and Control, 2019, 5(3): 236-242.